``-rtc [base=utc|localtime|datetime][,clock=host|rt|vm][,driftfix=none|slew]`` Specify ``base`` as ``utc`` or ``localtime`` to let the RTC start at the current UTC or local time, respectively. ``localtime`` is required for correct date in MS-DOS or Windows. To start at a specific point in time, provide datetime in the format ``2006-06-17T16:01:21`` or ``2006-06-17``. The default base is UTC.
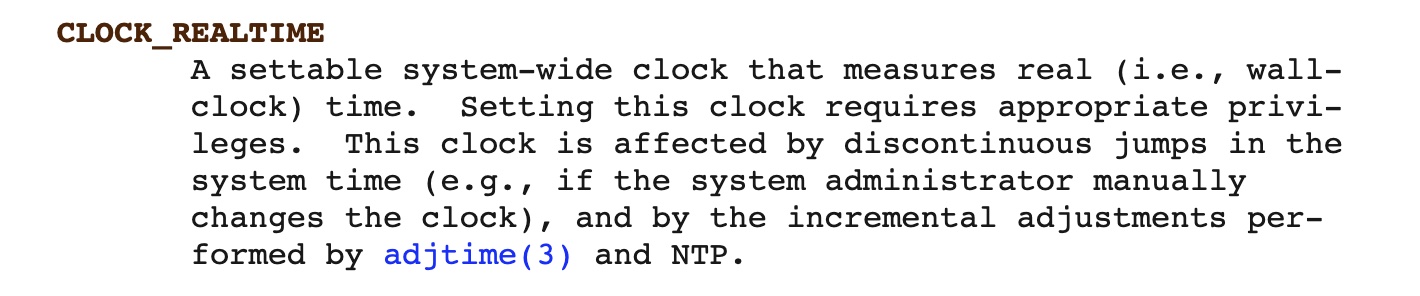
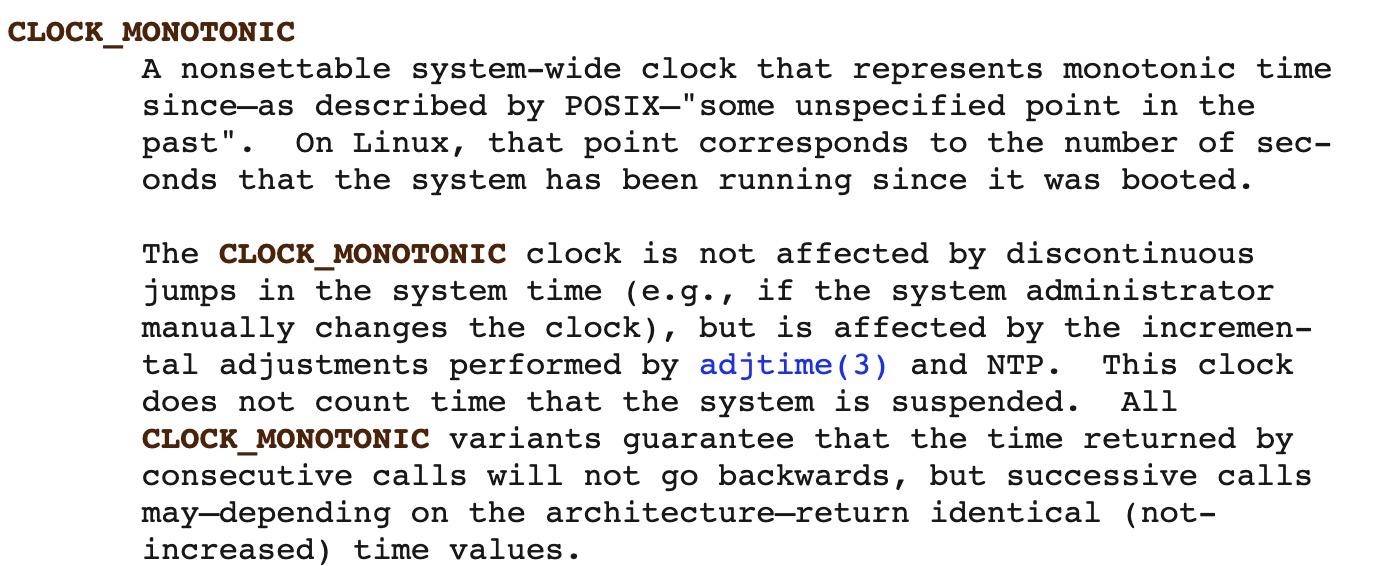
By default the RTC is driven by the host system time. This allows using of the RTC as accurate reference clock inside the guest, specifically if the host time is smoothly following an accurate external reference clock, e.g. via NTP. If you want to isolate the guest time from the host, you can set ``clock`` to ``rt`` instead, which provides a host monotonic clock if host support it. To even prevent the RTC from progressing during suspension, you can set ``clock`` to ``vm`` (virtual clock). '\ ``clock=vm``\ ' is recommended especially in icount mode in order to preserve determinism; however, note that in icount mode the speed of the virtual clock is variable and can in general differ from the host clock.
Enable ``driftfix`` (i386 targets only) if you experience time drift problems, specifically with Windows' ACPI HAL. This option will try to figure out how many timer interrupts were not processed by the Windows guest and will re-inject them.
UTC is the primary time standard by which the world regulates clocks and time.
system time vs monotonic clock NTP system time: monotonic clock:
/** * QEMUClockType: * * The following clock types are available: * * @QEMU_CLOCK_REALTIME: Real time clock * * The real time clock should be used only for stuff which does not * change the virtual machine state, as it runs even if the virtual * machine is stopped. * * @QEMU_CLOCK_VIRTUAL: virtual clock * * The virtual clock only runs during the emulation. It stops * when the virtual machine is stopped. * * @QEMU_CLOCK_HOST: host clock * * The host clock should be used for device models that emulate accurate * real time sources. It will continue to run when the virtual machine * is suspended, and it will reflect system time changes the host may * undergo (e.g. due to NTP). * * @QEMU_CLOCK_VIRTUAL_RT: realtime clock used for icount warp * * Outside icount mode, this clock is the same as @QEMU_CLOCK_VIRTUAL. * In icount mode, this clock counts nanoseconds while the virtual * machine is running. It is used to increase @QEMU_CLOCK_VIRTUAL * while the CPUs are sleeping and thus not executing instructions. */
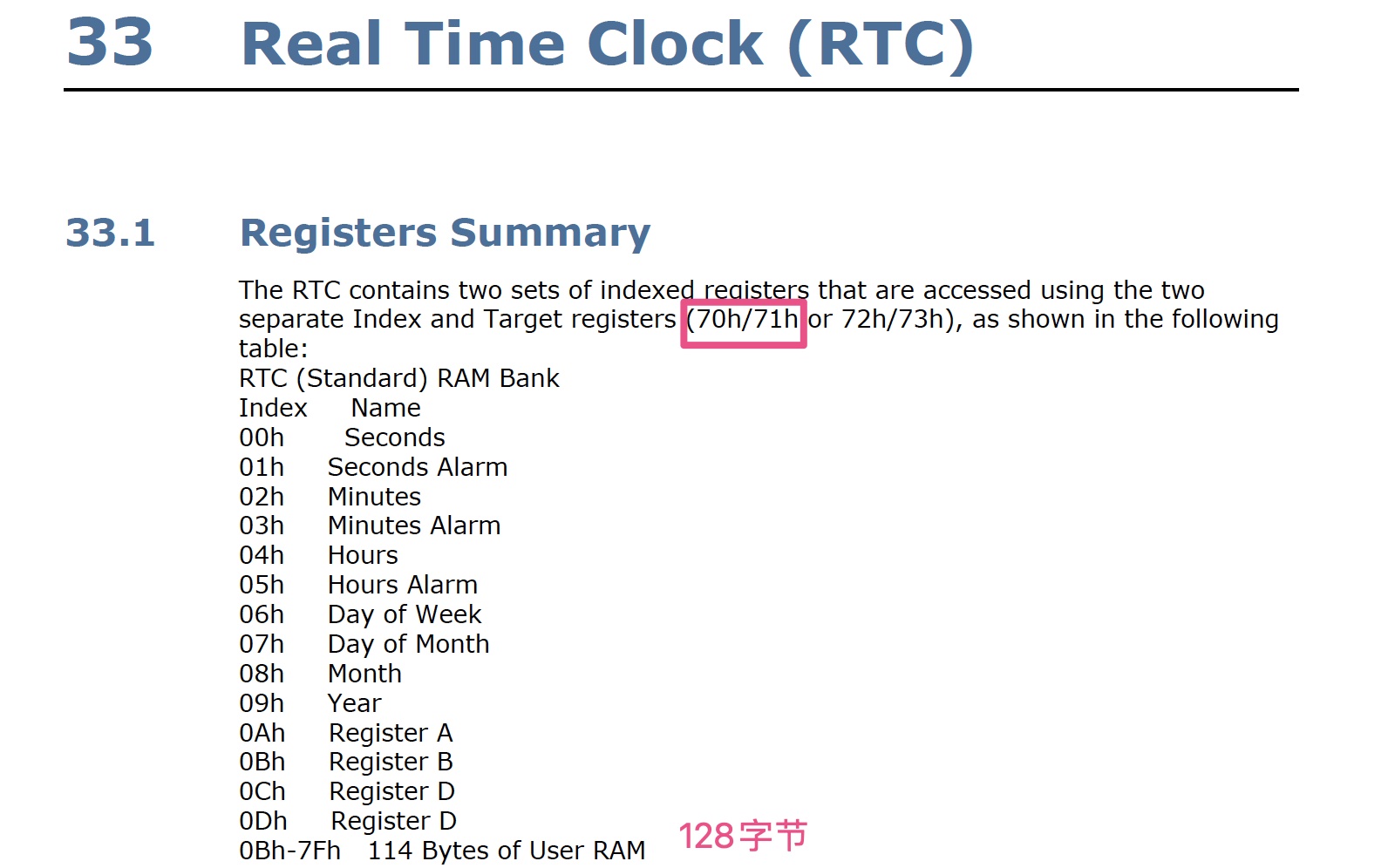
staticuint64_tcmos_ioport_read(void *opaque, hwaddr addr, unsigned size) { RTCState *s = opaque; int ret; if ((addr & 1) == 0) { return0xff; } else { switch(s->cmos_index) { case RTC_IBM_PS2_CENTURY_BYTE: s->cmos_index = RTC_CENTURY; /* fall through */ case RTC_CENTURY: case RTC_SECONDS: case RTC_MINUTES: case RTC_HOURS: case RTC_DAY_OF_WEEK: case RTC_DAY_OF_MONTH: case RTC_MONTH: case RTC_YEAR: /* if not in set mode, calibrate cmos before * reading*/ if (rtc_running(s)) { rtc_update_time(s); } ret = s->cmos_data[s->cmos_index]; break; ...
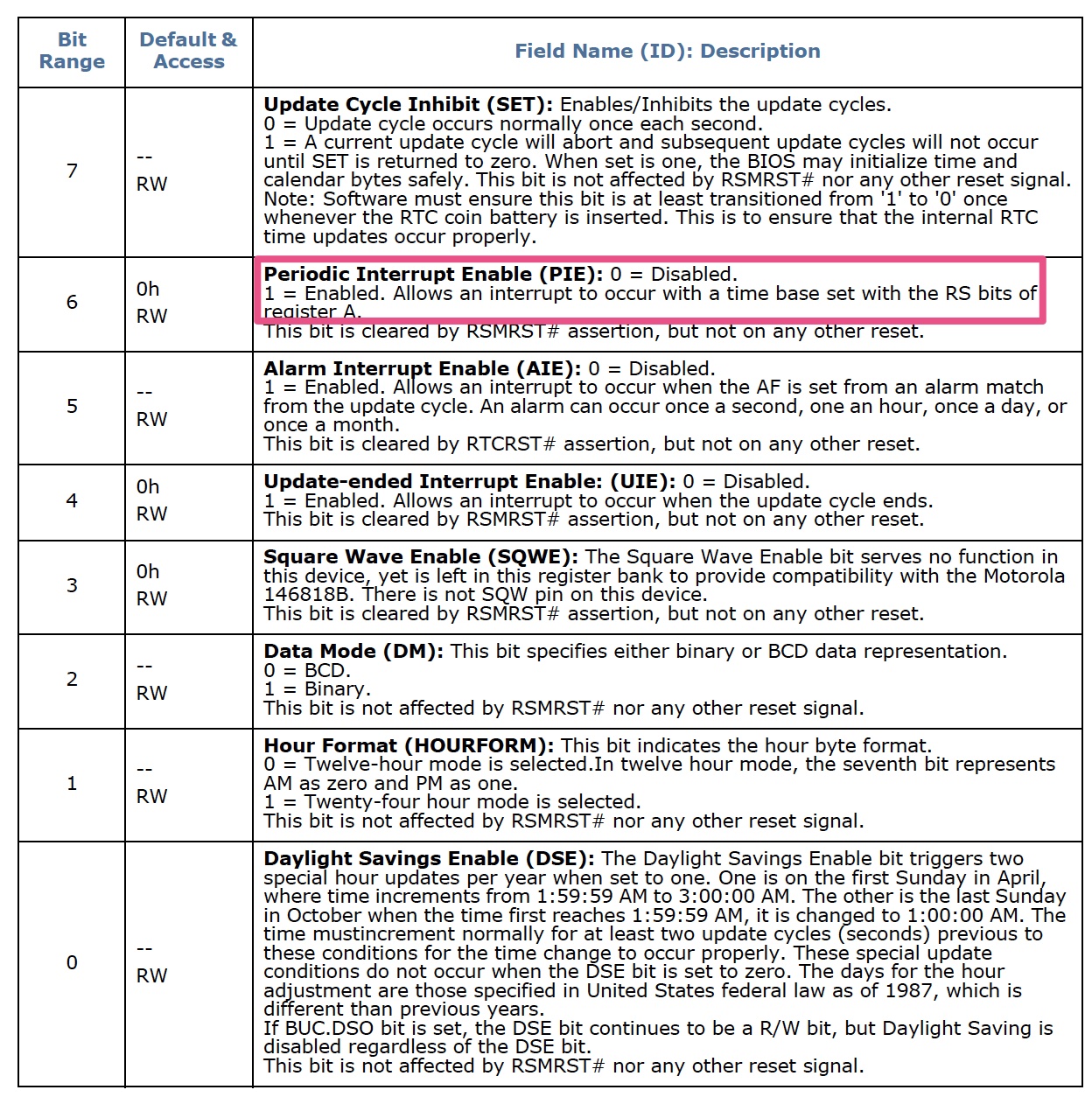
if ((addr & 1) == 0) { s->cmos_index = data & 0x7f; } else { CMOS_DPRINTF("cmos: write index=0x%02x val=0x%02" PRIx64 "\n", s->cmos_index, data); switch(s->cmos_index) { case RTC_SECONDS_ALARM: case RTC_MINUTES_ALARM: case RTC_HOURS_ALARM: s->cmos_data[s->cmos_index] = data; check_update_timer(s); break; case RTC_IBM_PS2_CENTURY_BYTE: s->cmos_index = RTC_CENTURY; /* fall through */ case RTC_CENTURY: case RTC_SECONDS: case RTC_MINUTES: case RTC_HOURS: case RTC_DAY_OF_WEEK: case RTC_DAY_OF_MONTH: case RTC_MONTH: case RTC_YEAR: s->cmos_data[s->cmos_index] = data; /* if in set mode, do not update the time */ if (rtc_running(s)) { rtc_set_time(s); check_update_timer(s); } break; case RTC_REG_A: update_periodic_timer = (s->cmos_data[RTC_REG_A] ^ data) & 0x0f; old_period = rtc_periodic_clock_ticks(s);
if ((data & 0x60) == 0x60) { if (rtc_running(s)) { rtc_update_time(s); } /* What happens to UIP when divider reset is enabled is * unclear from the datasheet. Shouldn't matter much * though. */ s->cmos_data[RTC_REG_A] &= ~REG_A_UIP; } elseif (((s->cmos_data[RTC_REG_A] & 0x60) == 0x60) && (data & 0x70) <= 0x20) { /* when the divider reset is removed, the first update cycle * begins one-half second later*/ if (!(s->cmos_data[RTC_REG_B] & REG_B_SET)) { s->offset = 500000000; rtc_set_time(s); } s->cmos_data[RTC_REG_A] &= ~REG_A_UIP; } /* UIP bit is read only */ s->cmos_data[RTC_REG_A] = (data & ~REG_A_UIP) | (s->cmos_data[RTC_REG_A] & REG_A_UIP);
if (update_periodic_timer) { periodic_timer_update(s, qemu_clock_get_ns(rtc_clock), old_period, true); }
if (data & REG_B_SET) { /* update cmos to when the rtc was stopping */ if (rtc_running(s)) { rtc_update_time(s); } /* set mode: reset UIP mode */ s->cmos_data[RTC_REG_A] &= ~REG_A_UIP; data &= ~REG_B_UIE; } else { /* if disabling set mode, update the time */ if ((s->cmos_data[RTC_REG_B] & REG_B_SET) && (s->cmos_data[RTC_REG_A] & 0x70) <= 0x20) { s->offset = get_guest_rtc_ns(s) % NANOSECONDS_PER_SECOND; rtc_set_time(s); } } ...